Paper Sharing
【Member Papers】β‑Ga₂O₃‑Based Solar‑Blind Neuromorphic Vision Sensor for Motion Perception and Trajectory Prediction
日期:2026-05-13阅读:41
Researchers from the Nanjing University of Posts and Telecommunications, Peking University and Tsinghua University have published a dissertation titled “β‑Ga₂O₃‑Based Solar‑Blind Neuromorphic Vision Sensor for Motion Perception and Trajectory Prediction” in IEEE Transactions on Electron Devices.
Background
Bioinspired vision systems have achieved advanced motion processing in the visible region, but the exploration of applying these principles to dynamic trajectory monitoring in the solar‑blind ultraviolet spectrum is still scarce. Applications such as missile trajectory tracking, power grid leakage detection and microbial analysis urgently need advanced imaging technologies that can work in the ultraviolet, especially deep ultraviolet band. Solar‑blind ultraviolet detection can effectively suppress the false alarm rate and overcome the limitations of visible and infrared monitoring that are susceptible to sunlight reflection and ground heat source interference, which is suitable for real‑time acquisition and high‑precision trajectory tracking of high‑speed moving targets. However, most existing bioinspired vision systems are limited to the visible band, and β‑Ga₂O₃ optoelectronic devices are mostly single devices without spatial imaging capability and actively suppress the persistent photoconductivity effect, making it difficult to realize on‑chip spatiotemporal information fusion and motion trajectory memory computing, resulting in obvious research gaps.
Abstract
Although bioinspired vision systems have advanced motion processing in the visible domain, leveraging these principles for dynamic trajectory monitoring within the solar‑blind ultraviolet (UV) spectrum remains largely unexplored. This work introduces a solar‑blind neuromorphic visual sensor based on an 8 × 8 β‑Ga₂O₃ array that exploits intrinsic slow‑decay carrier dynamics to encode temporal information directly into spatial intensity patterns. The oxygen vacancy defects within the material function as synaptic memory, which creates a visual motion trail that retains historical trajectory data without external storage. We demonstrate two distinct computational tasks using this hardware. First, a lightweight convolutional neural network (CNN) attains a trajectory direction recognition accuracy approaching 100% across varying noise conditions. Subsequently, we successfully predict future missile positions using a reservoir computing (RC) framework with a normalized position error of 0.00085, a structural similarity index (SSIM) of 0.995, and an intersection over union (IoU) of 0.85. This study presents a UVC bioinspired sensing system, demonstrating its potential for simultaneous motion detection and trajectory prediction in demanding aerospace tracking environments.
Highlights
A solar‑blind neuromorphic visual sensor based on an 8 × 8 β‑Ga₂O₃ array is developed.
The oxygen vacancy defects act as synaptic memory to realize visual motion trail and trajectory data storage without external devices.
A lightweight CNN achieves nearly 100% trajectory direction recognition accuracy under various noise conditions.
A reservoir computing framework is used to predict missile positions with high precision (normalized position error = 0.00085, SSIM = 0.995, IoU = 0.85).
The system extends neuromorphic vision to solar‑blind UV band for aerospace tracking applications.
Conclusion
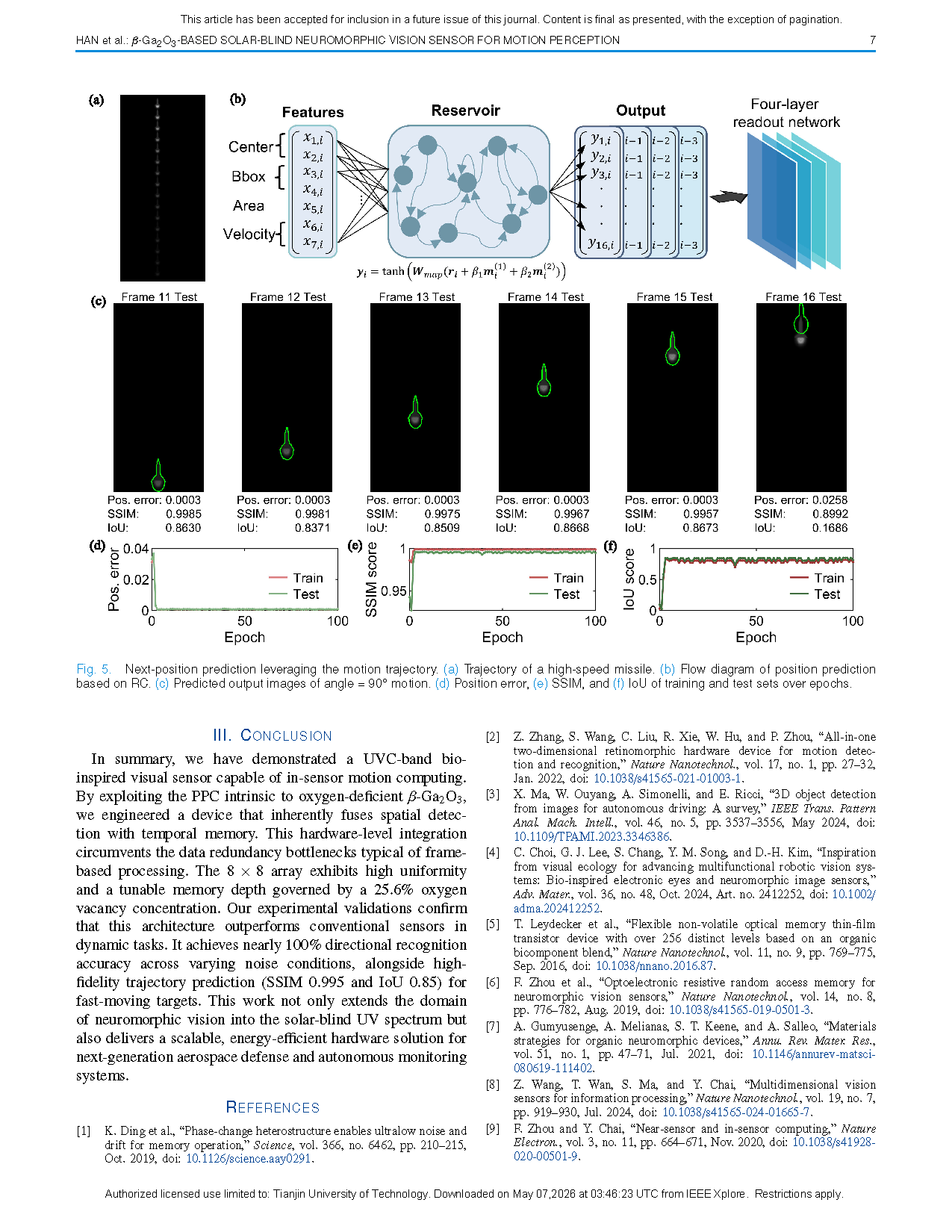
In summary, we have demonstrated a UVC‑band bioinspired visual sensor capable of in‑sensor motion computing. By exploiting the PPC intrinsic to oxygen‑deficient β‑Ga₂O₃, we engineered a device that inherently fuses spatial detection with temporal memory. This hardware‑level integration circumvents the data redundancy bottlenecks typical of frame‑based processing. The 8 × 8 array exhibits high uniformity and a tunable memory depth governed by a 25.6% oxygen vacancy concentration. Our experimental validations confirm that this architecture outperforms conventional sensors in dynamic tasks. It achieves nearly 100% directional recognition accuracy across varying noise conditions, alongside high‑fidelity trajectory prediction (SSIM 0.995 and IoU 0.85) for fast‑moving targets. This work not only extends the domain of neuromorphic vision into the solar‑blind UV spectrum but also delivers a scalable, energy‑efficient hardware solution for next‑generation aerospace defense and autonomous monitoring systems.
Project Support
This work was supported in part by the National Natural Science Foundation of China under Grant 62401276, in part by the Natural Science Research StartUp Foundation of Recruiting Talents of Nanjing University of Posts and Telecommunications under Grant NY223161, and in part by Suzhou Critical Core Technology Research Project under Grant SYG2024003.
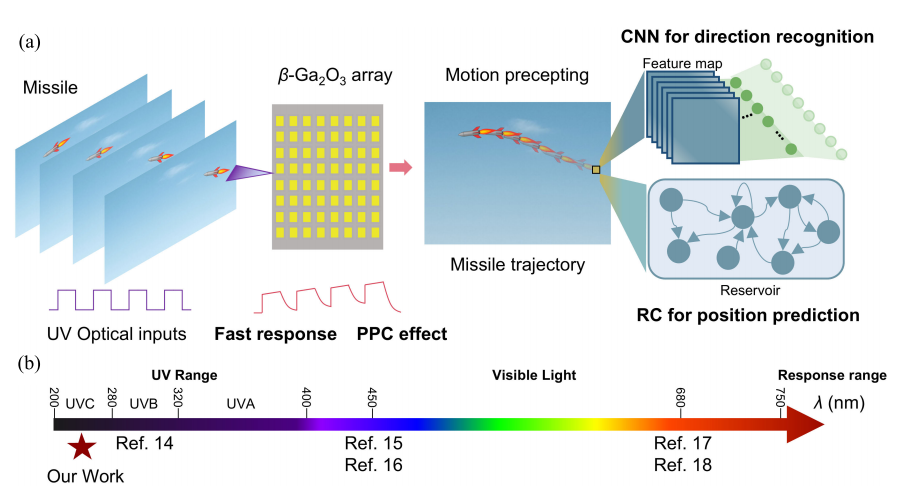
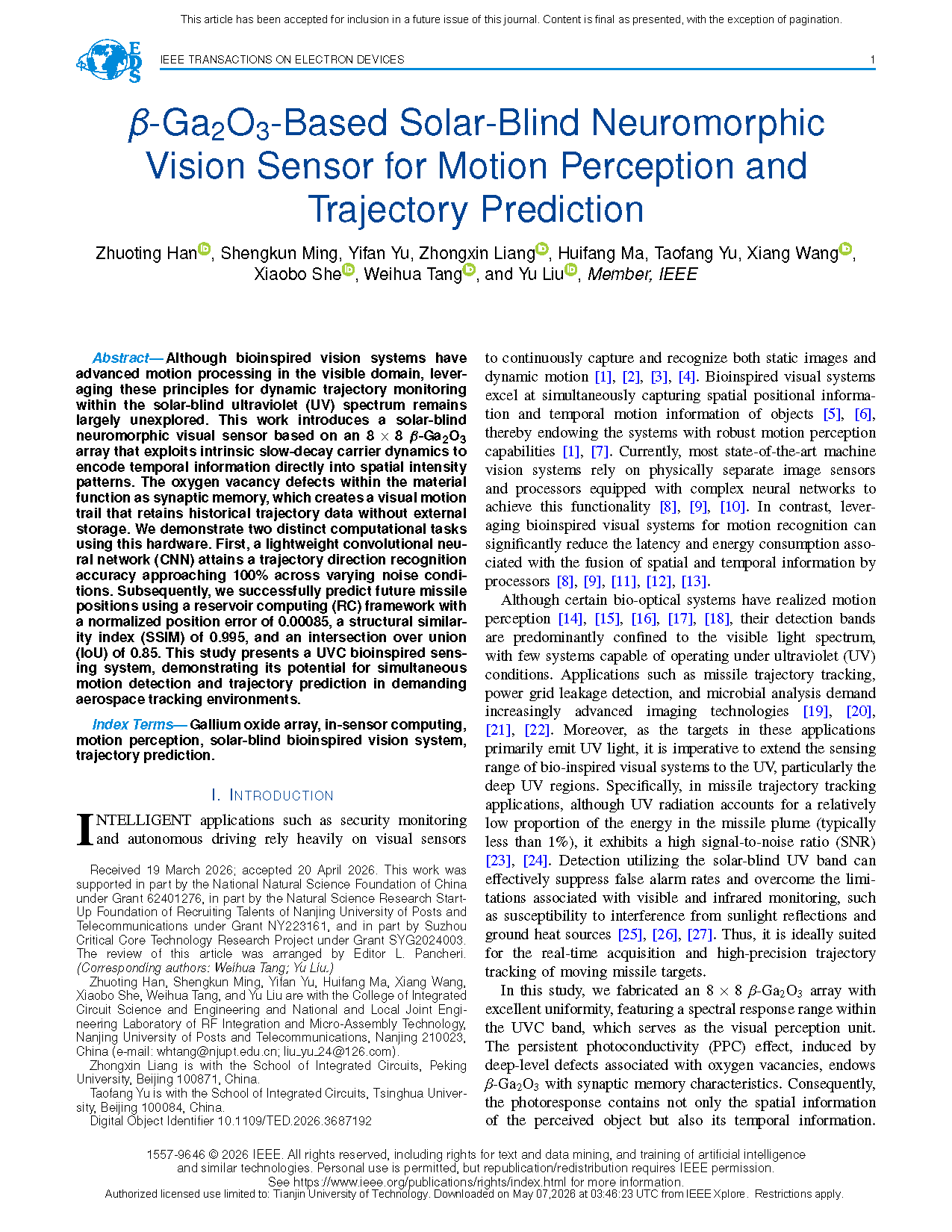
Fig. 1. Illustration of UV bioinspired system for missile trajectory perception. (a) Schematic of the bioinspired visual sensor based on β‑Ga₂O₃ array and the application on direction recognition and position prediction. (b) Comparison on operating waveband with other bioinspired systems.
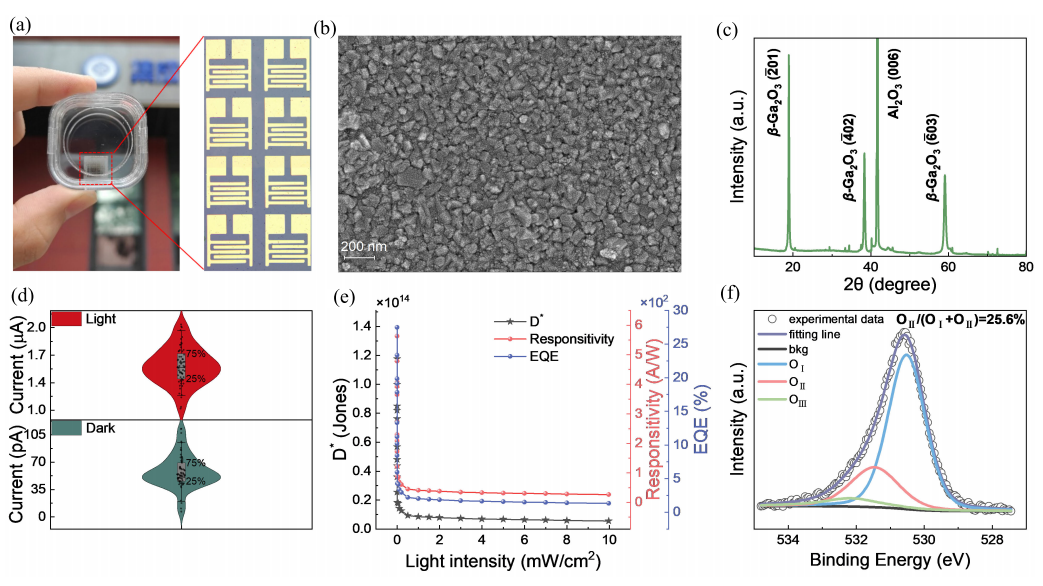
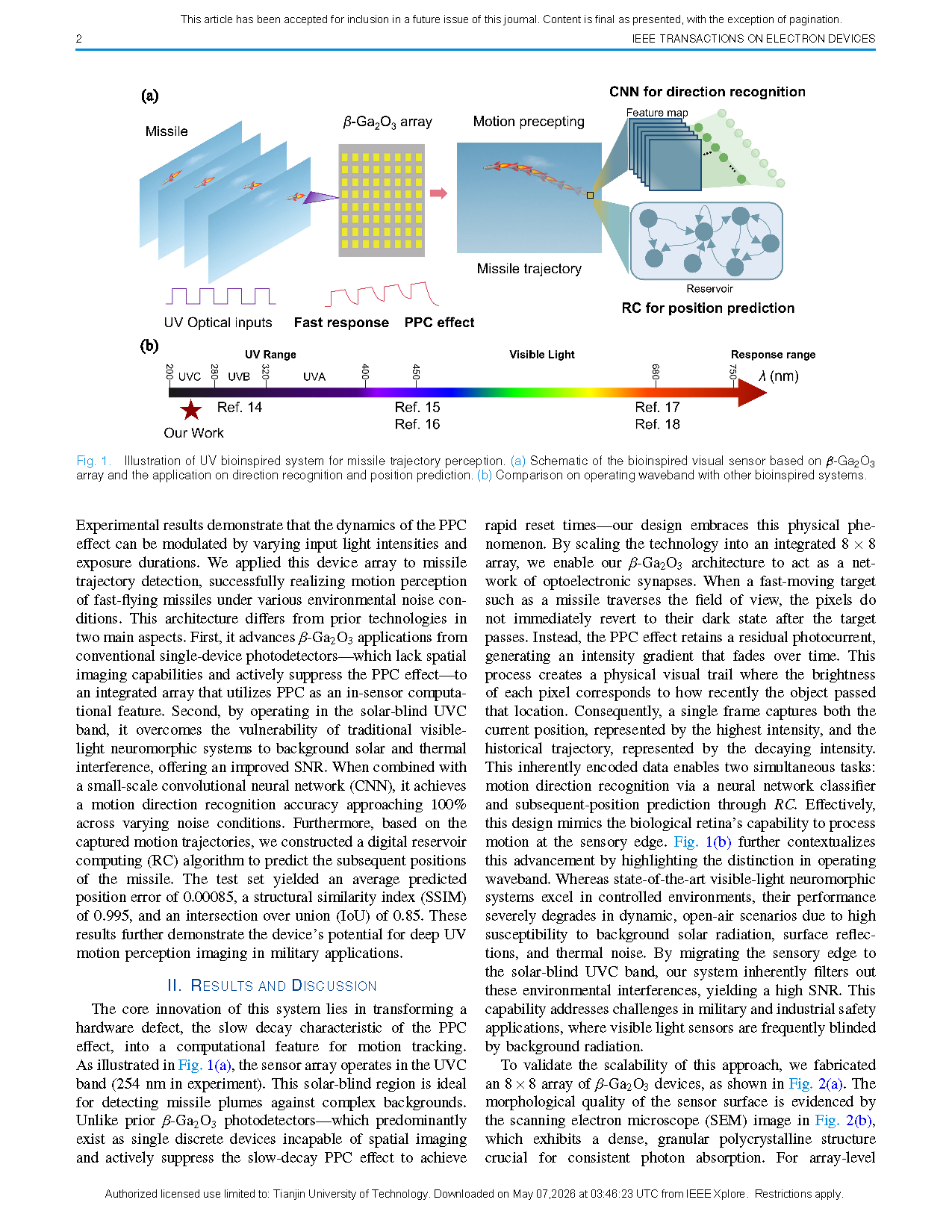
Fig. 2. Characterizations of the 8 × 8 β‑Ga₂O₃ array. (a) Optical photograph of the device array and optical microscope image of the local region. (b) Image of the device under SEM. (c) XRD pattern of the β‑Ga₂O₃ film. (d) Statistical distribution of the photocurrents and dark currents of the device array. (e) Detectivity, responsivity and EQE of β‑Ga₂O₃ under various light intensity. (f) XPS of the device.
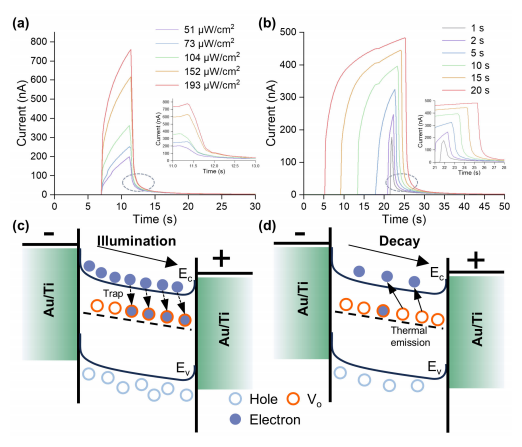
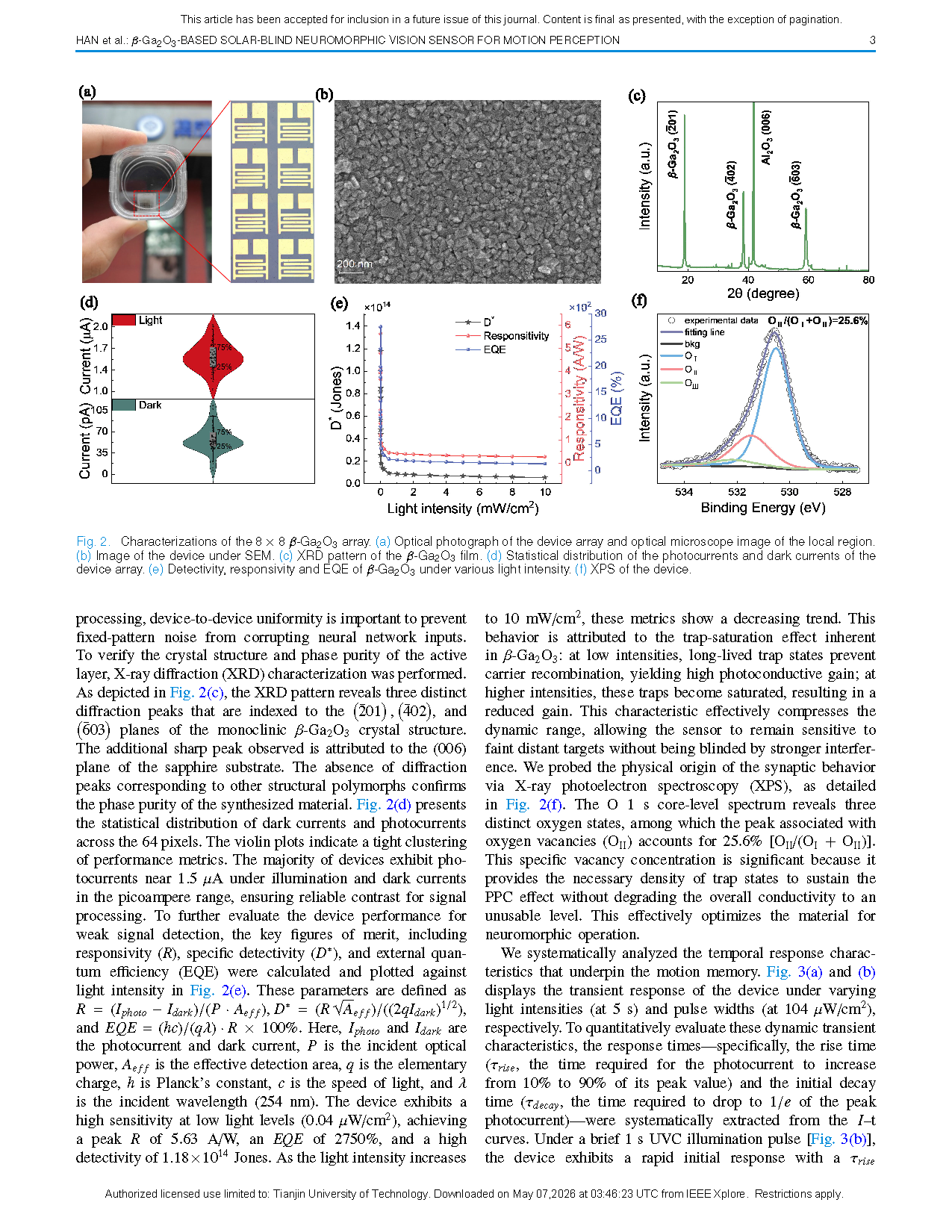
Fig. 3. Mechanism of motion perception. Temporal response current characterization under five different UV light intensities (a) and six different pulse widths (b). Band diagrams depicting the carrier trapping dynamics under illumination (c) and the decay mechanism induced by thermal emission after light withdrawal (d).
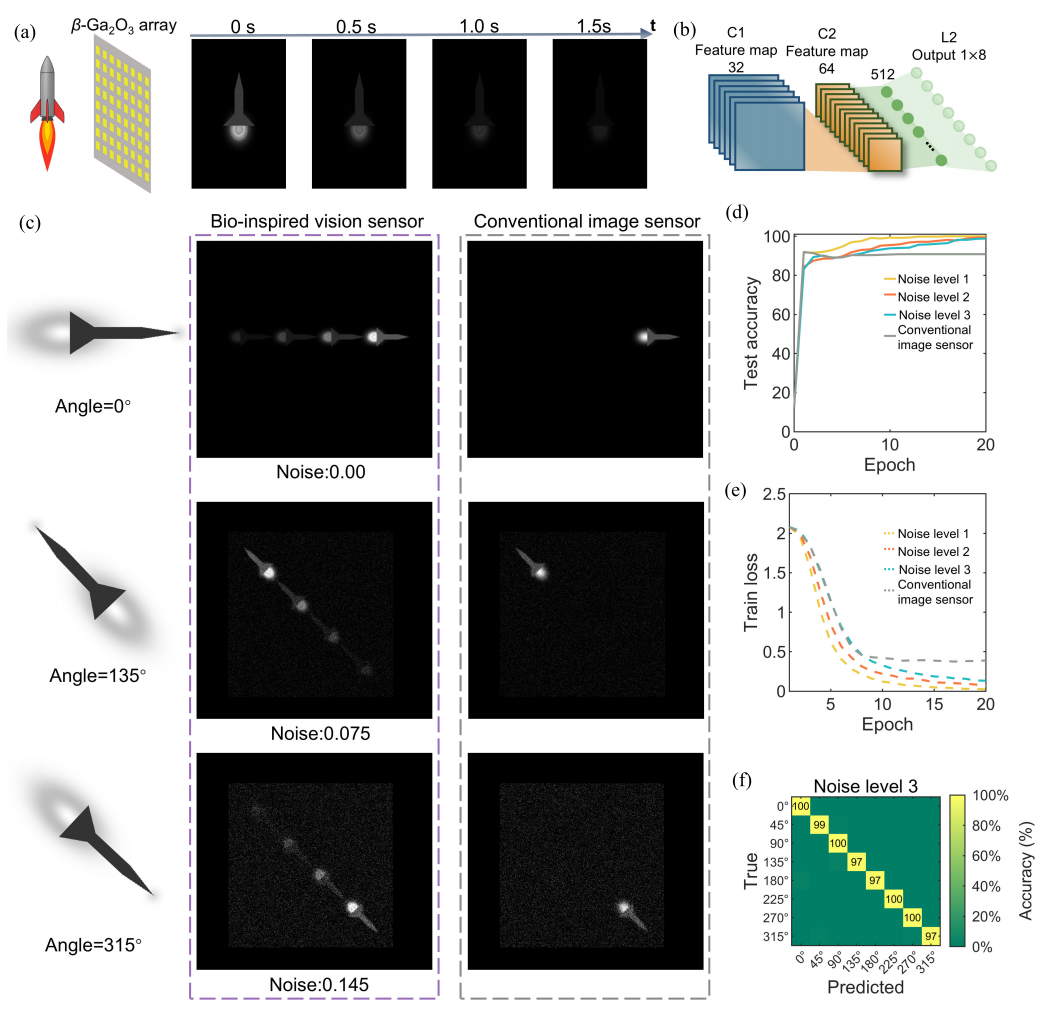
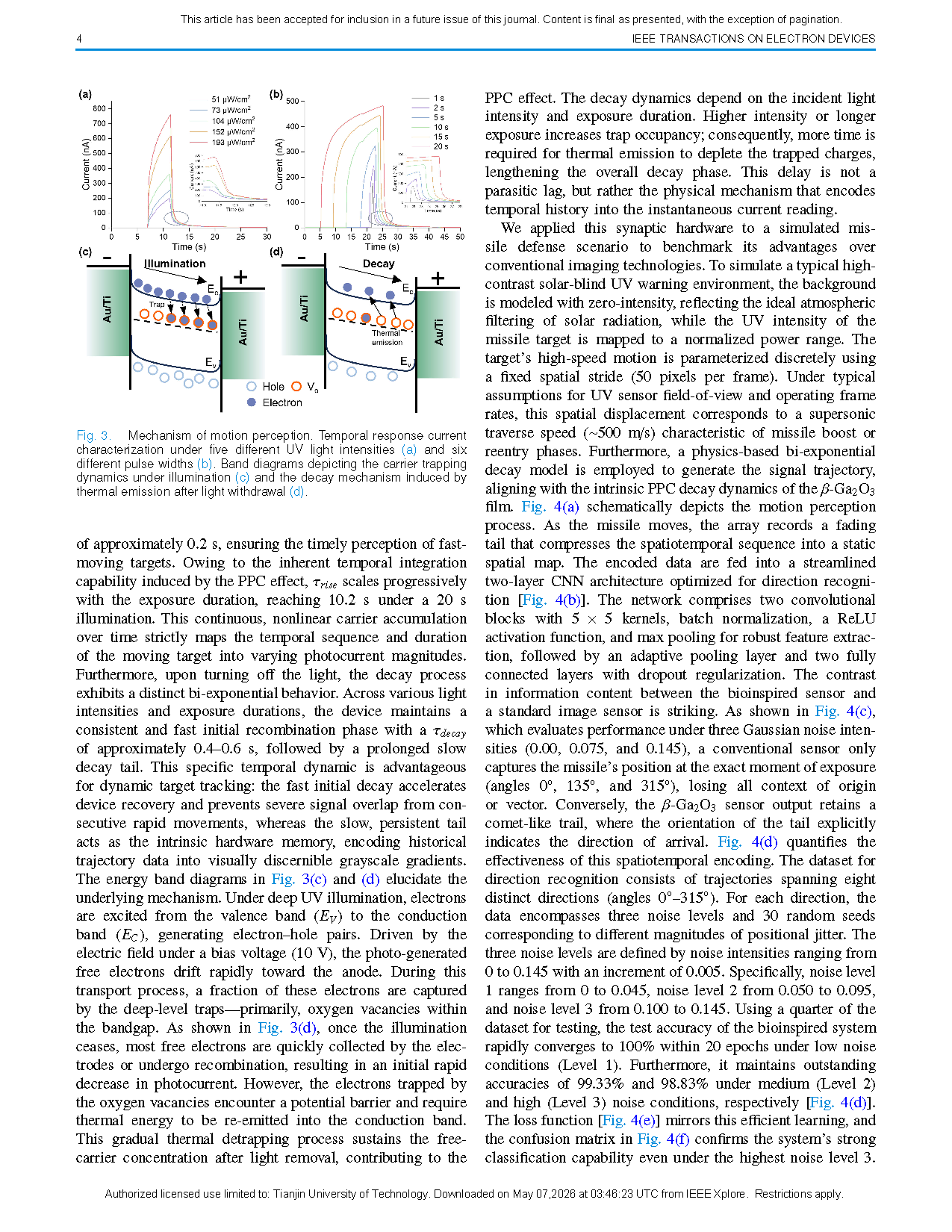
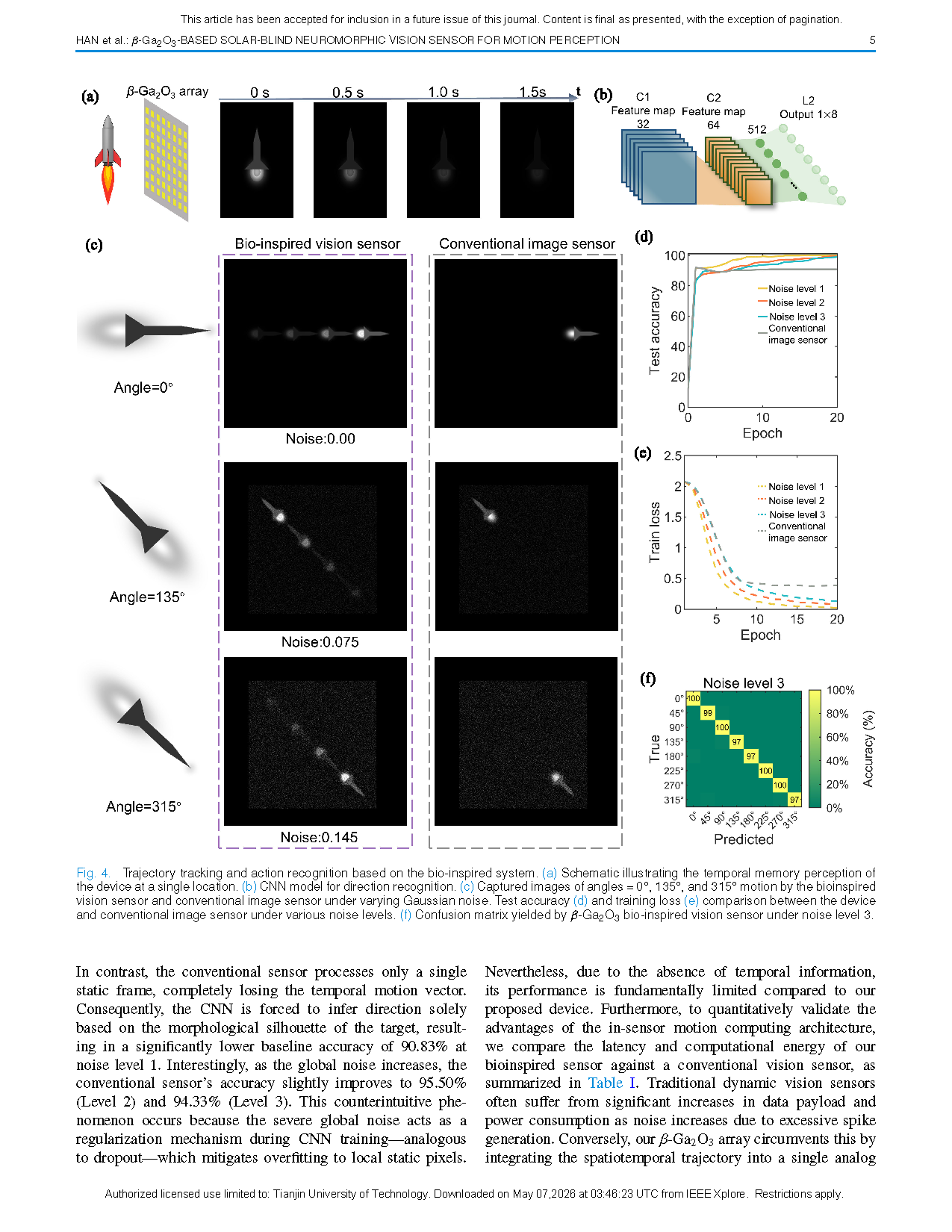
Fig. 4. Trajectory tracking and action recognition based on the bio‑inspired system. (a) Schematic illustrating the temporal memory perception of the device at a single location. (b) CNN model for direction recognition. (c) Captured images of angles = 0°, 135°, and 315° motion by the bioinspired vision sensor and conventional image sensor under varying Gaussian noise. Test accuracy (d) and training loss (e) comparison between the device and conventional image sensor under various noise levels. (f) Confusion matrix yielded by β‑Ga₂O₃ bio‑inspired vision sensor under noise level 3.
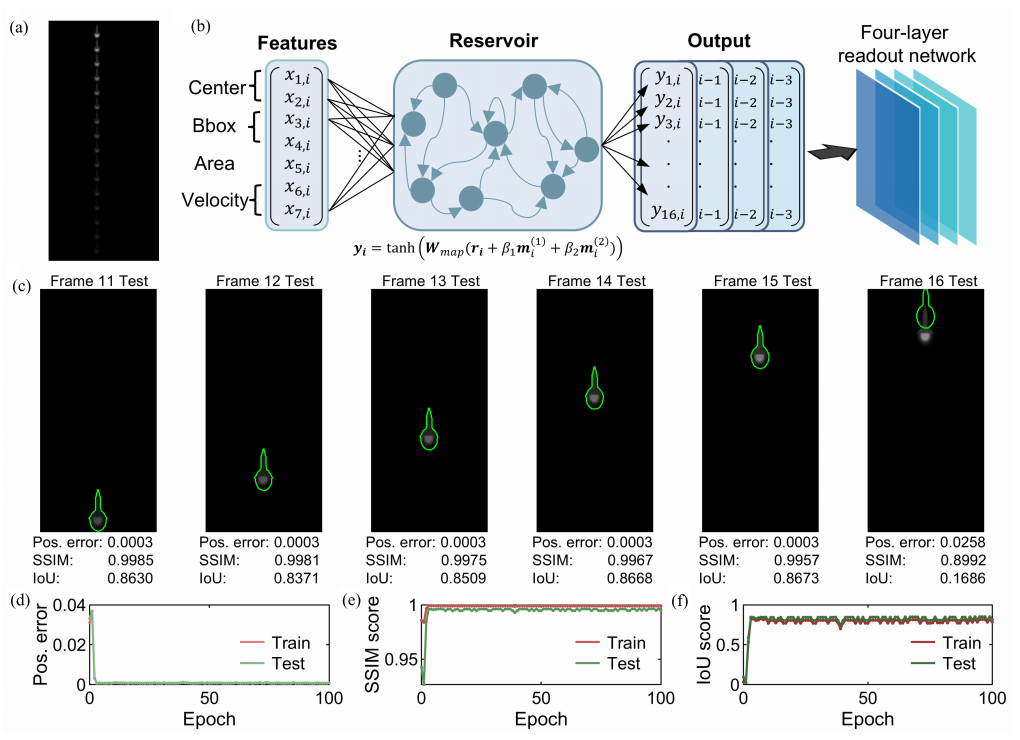
Fig. 5. Next‑position prediction leveraging the motion trajectory. (a) Trajectory of a high‑speed missile. (b) Flow diagram of position prediction based on RC. (c) Predicted output images of angle = 90° motion. (d) Position error, (e) SSIM, and (f) IoU of training and test sets over epochs.
DOI:
10.1109/TED.2026.3687192