论文分享
【会员论文】南京邮电大学唐为华教授联合北京大学、清华大学团队:基于β‑Ga₂O₃的日盲类脑视觉传感器:用于运动感知与轨迹预测
日期:2026-05-13阅读:40
由南京邮电大学唐为华教授联合北京大学、清华大学的研究团队在学术期刊 IEEE Transactions on Electron Devices 发布了一篇名为 β‑Ga₂O₃‑Based Solar‑Blind Neuromorphic Vision Sensor for Motion Perception and Trajectory Prediction(基于 β‑Ga₂O₃的日盲类脑视觉传感器:用于运动感知与轨迹预测)的文章。
背 景
类脑视觉系统在可见光领域已实现先进的运动处理能力,但将该原理拓展至日盲紫外光谱进行动态轨迹监测的研究仍十分匮乏。导弹轨迹追踪、电网泄漏检测、微生物分析等应用迫切需要可工作在紫外尤其是深紫外波段的先进成像技术;日盲紫外探测能有效抑制虚警率,克服可见光与红外监测易受阳光反射、地面热源干扰的局限,适合高速运动目标的实时采集与高精度轨迹跟踪。然而,现有类脑视觉系统检测波段多局限于可见光,且 β-Ga₂O₃ 光电器件多为单器件、缺乏空间成像能力并主动抑制持续光电导效应,难以实现片上时空信息融合与运动轨迹记忆计算,存在明显研究空白。
主要内容
尽管类脑视觉系统在可见光领域已推动运动处理技术发展,但将这些原理用于日盲紫外光谱内的动态轨迹监测仍未被充分探索。本研究提出一种基于 8 × 8 β-Ga₂O₃ 阵列的日盲型类脑视觉传感器,利用材料本征的慢衰减载流子动力学将时间信息直接编码为空间强度分布。材料内部的氧空位缺陷充当突触记忆,无需外部存储即可生成保留历史轨迹数据的视觉运动轨迹。该团队利用该硬件完成两项独立计算任务:其一,轻量级卷积神经网络(CNN)在不同噪声条件下实现接近 100% 的轨迹方向识别精度;其二,基于储备池计算(RC)框架成功预测导弹未来位置,归一化位置误差为 0.00085,结构相似性指数(SSIM)为 0.995,交并比(IoU)为 0.85。本研究提出了 UVC 波段类脑传感系统,证实其在严苛航空航天追踪环境中同时实现运动检测与轨迹预测的潜力。
创新点
•研制出基于 8 × 8 β‑Ga₂O₃ 阵列的日盲类脑视觉传感器。
•氧空位缺陷充当突触记忆,实现视觉运动轨迹与轨迹数据存储,无需外部设备。
•轻量级卷积神经网络在不同噪声条件下实现接近 100% 的轨迹方向识别精度。
•采用储备池计算框架高精度预测导弹位置(归一化位置误差 0.00085,SSIM = 0.995,IoU = 0.85)。
•该系统将类脑视觉拓展至日盲紫外波段,可用于航空航天追踪应用。
总 结
综上,该团队展示了一种可实现片上运动计算的 UVC 波段类脑视觉传感器。通过利用缺氧型 β‑Ga₂O₃ 本征的持续光电导(PPC)效应,设计出可将空间探测与时间记忆本征融合的器件。这种硬件级集成规避了传统帧处理中典型的数据冗余瓶颈。8 × 8 阵列具有高均匀性,且由 25.6% 氧空位浓度调控可灵活调节记忆深度。实验验证证实该结构在动态任务中优于传统传感器,可在不同噪声条件下实现接近 100% 的方向识别精度,并对高速目标实现高保真轨迹预测(SSIM 0.995、IoU 0.85)。本工作不仅将类脑视觉领域拓展至日盲紫外光谱,还为下一代航空航天防御与自主监测系统提供了可扩展、低功耗的硬件方案。
项目支持
本研究得到国家自然科学基金(项目编号:62401276)、南京邮电大学人才引进自然科学研究启动基金(项目编号:NY223161)以及苏州市关键核心技术研究项目(项目编号:SYG2024003)的资助。
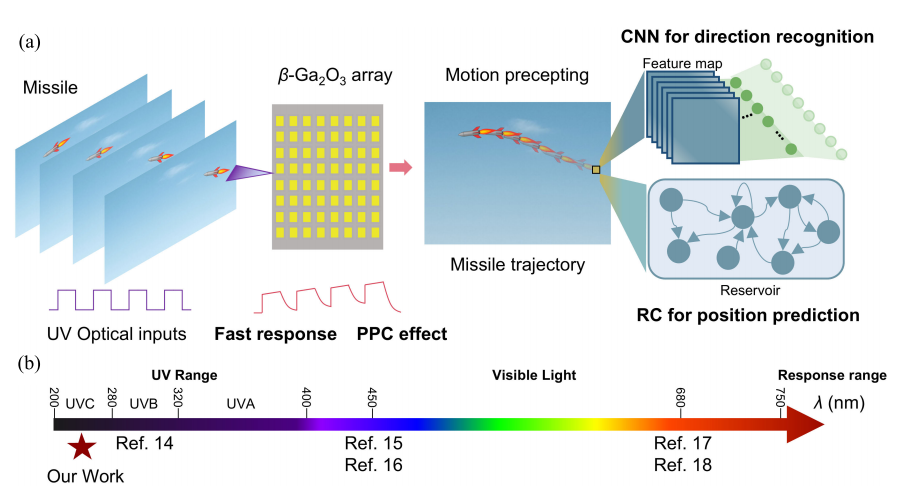
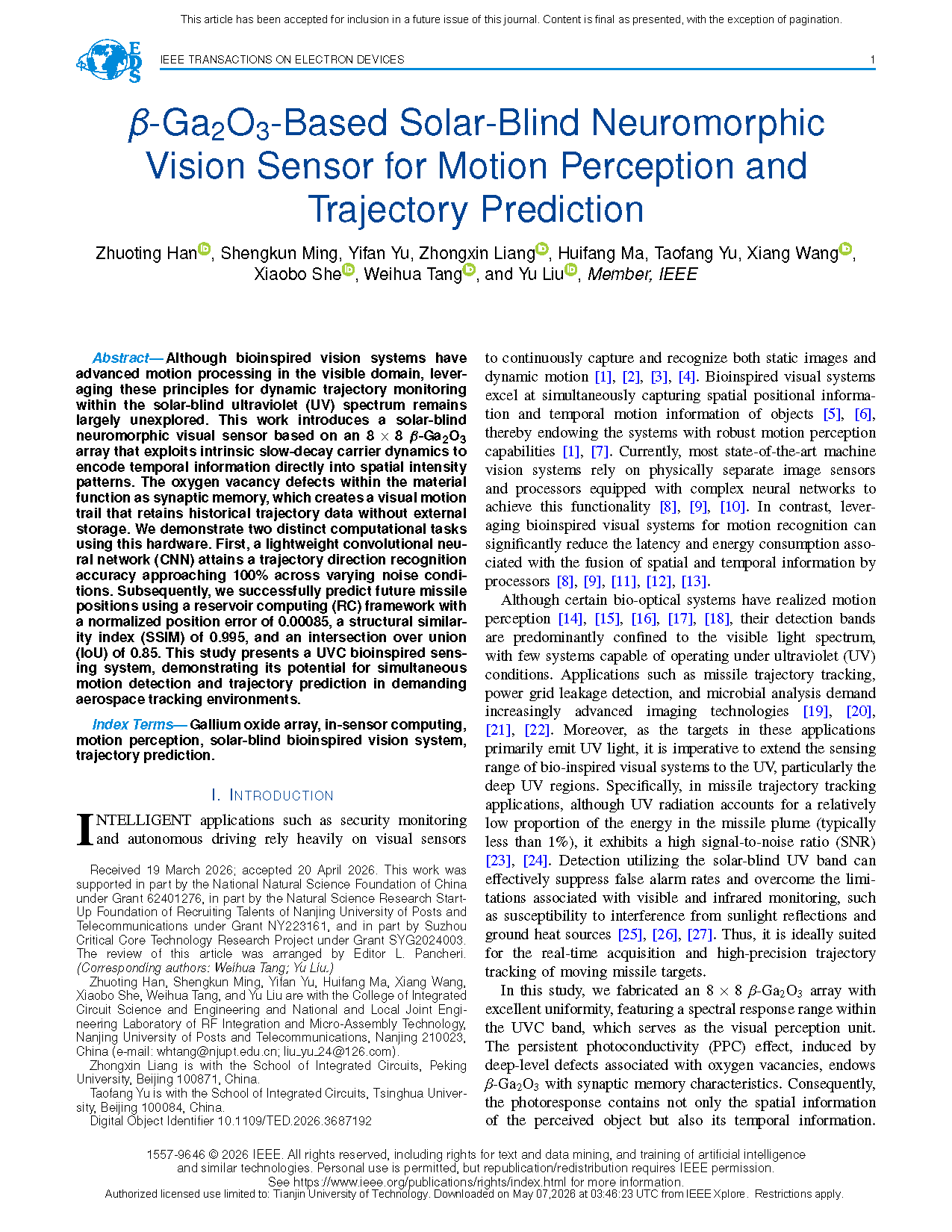
图 1. 用于导弹轨迹感知的紫外类脑系统示意图。(a) 基于 β‑Ga₂O₃阵列的类脑视觉传感器结构及其在方向识别与位置预测中的应用示意图。(b) 与其他类脑系统的工作波段对比。
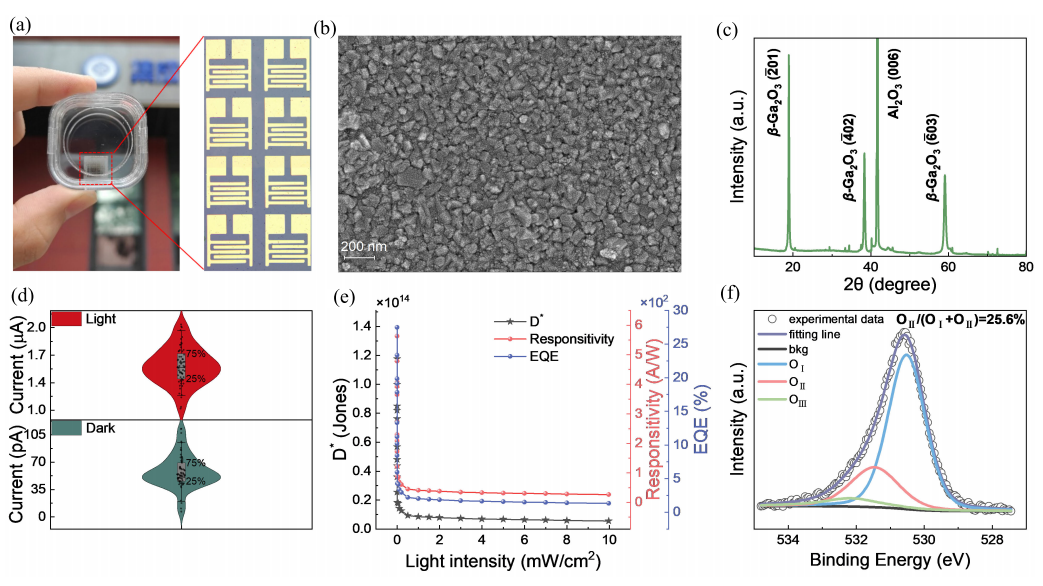
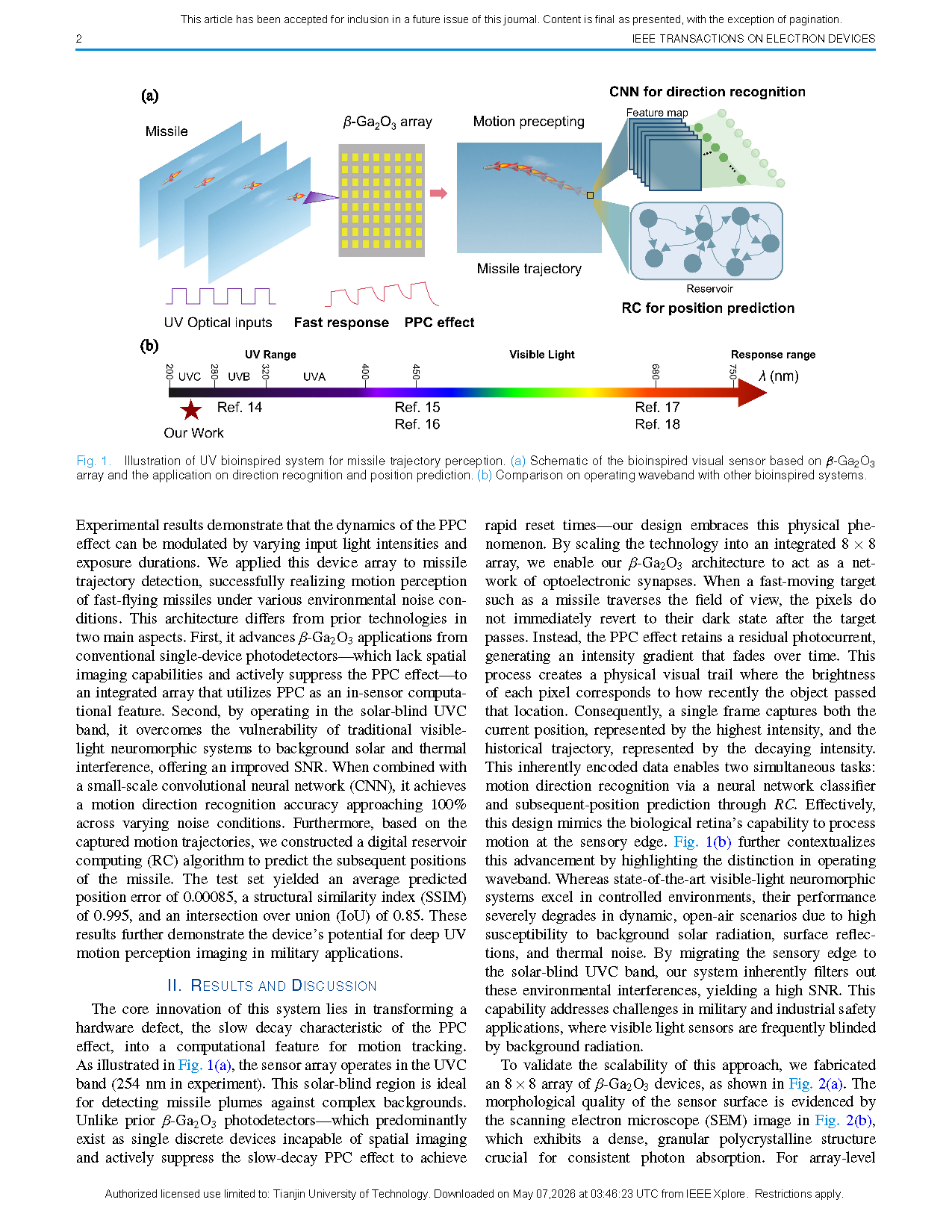
图 2. 8 × 8 β‑Ga₂O₃ 阵列的表征。(a) 器件阵列实物照片与局部区域光学显微镜图像。(b) 器件扫描电子显微镜(SEM)图像。(c) β‑Ga₂O₃ 薄膜的 X 射线衍射(XRD)图谱。(d) 器件阵列的光电流与暗电流统计分布。(e) 不同光强度下 β‑Ga₂O₃的探测率、响应度和外量子效率(EQE)。(f) 器件的 X 射线光电子能谱(XPS)。
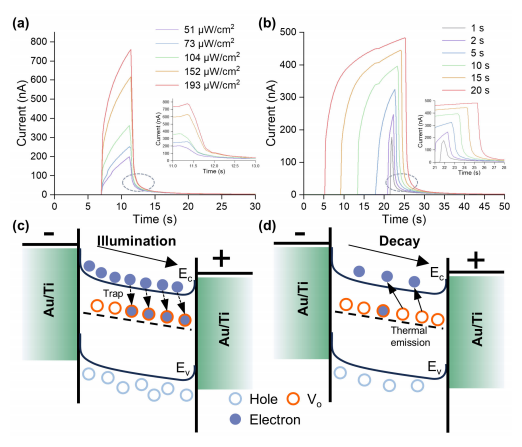
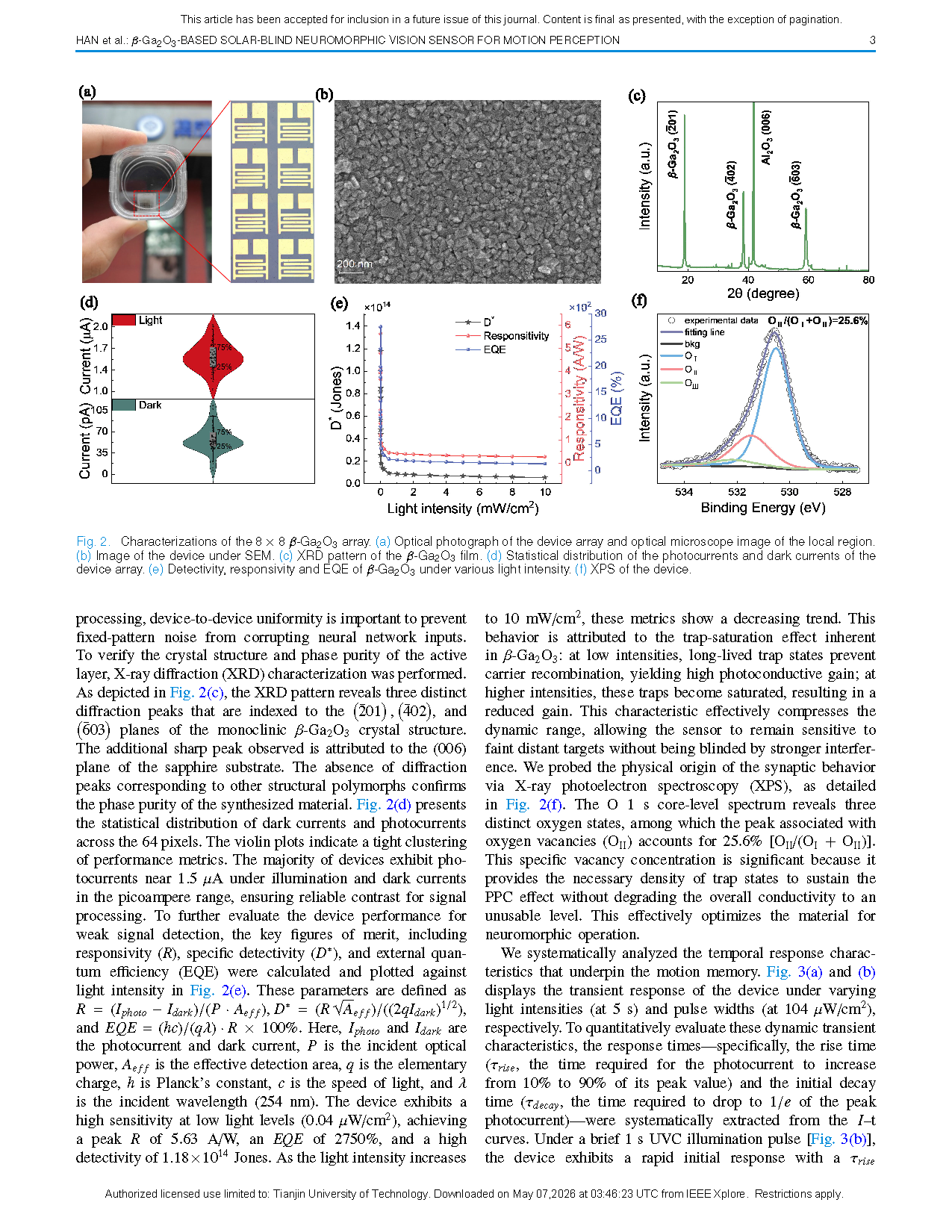
图 3. 运动感知机理。(a) 五种不同紫外光强度下和 (b) 六种不同脉冲宽度下的瞬态响应电流表征。(c) 光照下载流子俘获动力学与 (d) 光照停止后热激发导致的衰减机理的能带图。
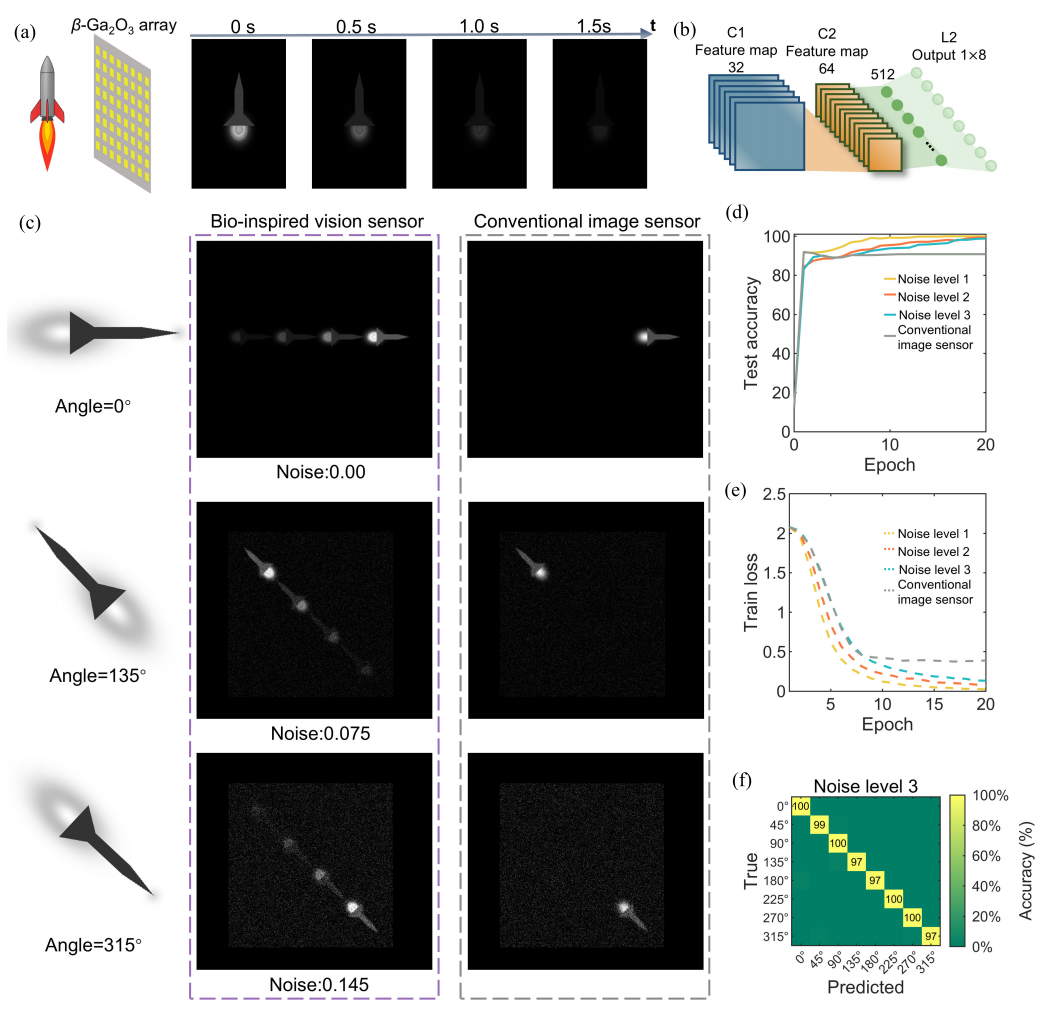
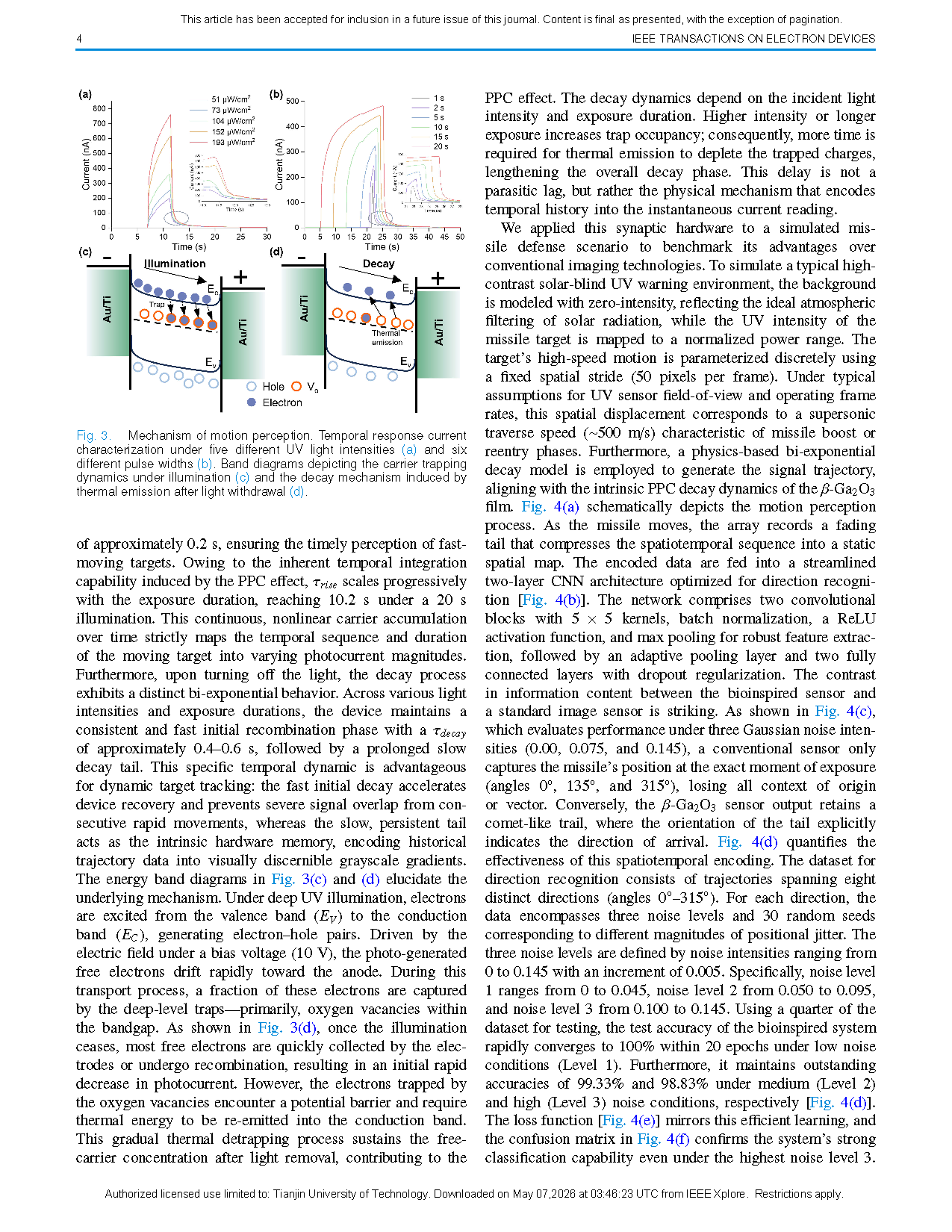
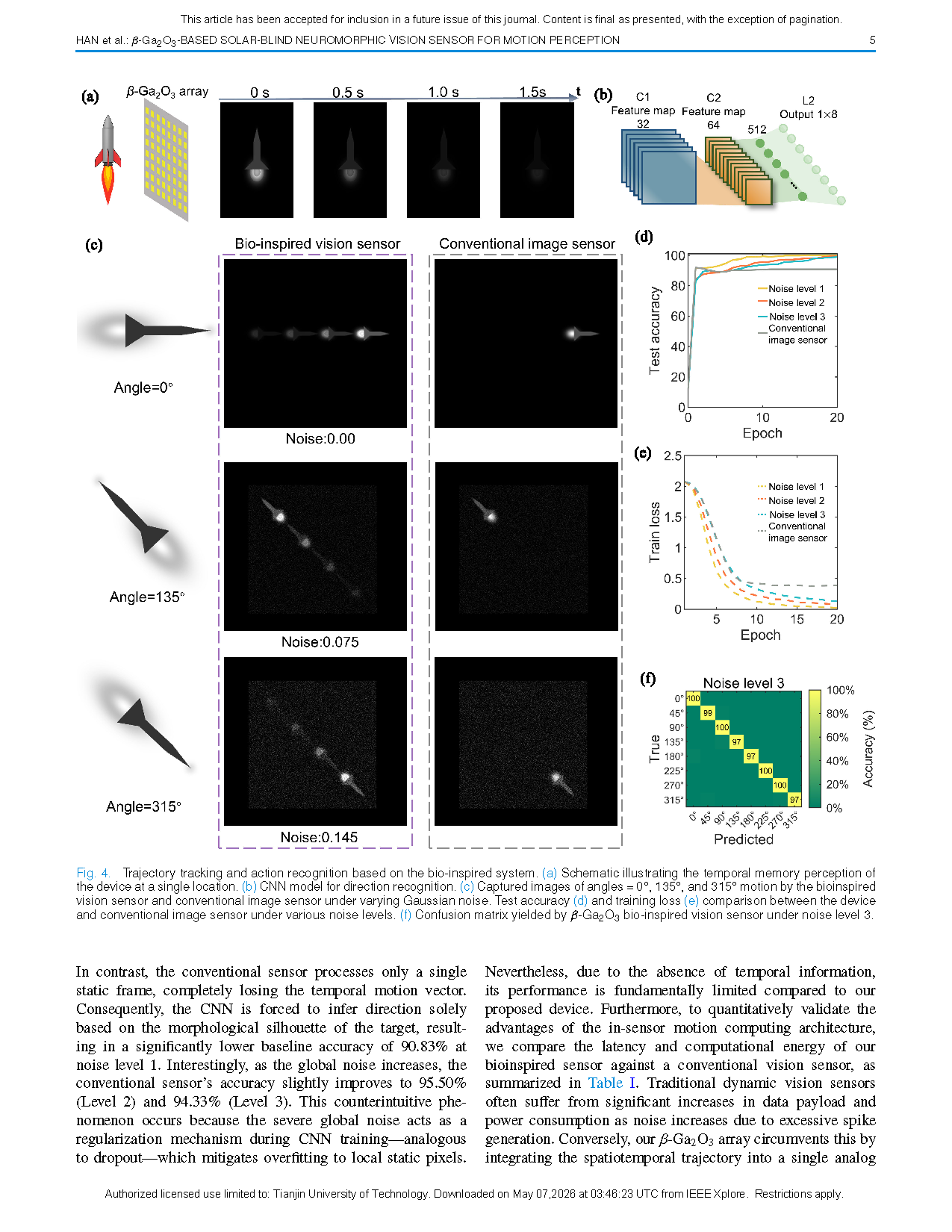
图 4. 基于类脑系统的轨迹跟踪与动作识别。(a) 器件在单一位置的时间记忆感知示意图。(b) 用于方向识别的 CNN 模型。(c) 类脑视觉传感器与传统图像传感器在不同高斯噪声下拍摄的 0°、135°、315° 运动图像。(d) 不同噪声水平下该器件与传统图像传感器的测试精度对比与 (e) 训练损失对比。(f) β‑Ga₂O₃ 类脑视觉传感器在噪声等级 3 下的混淆矩阵。
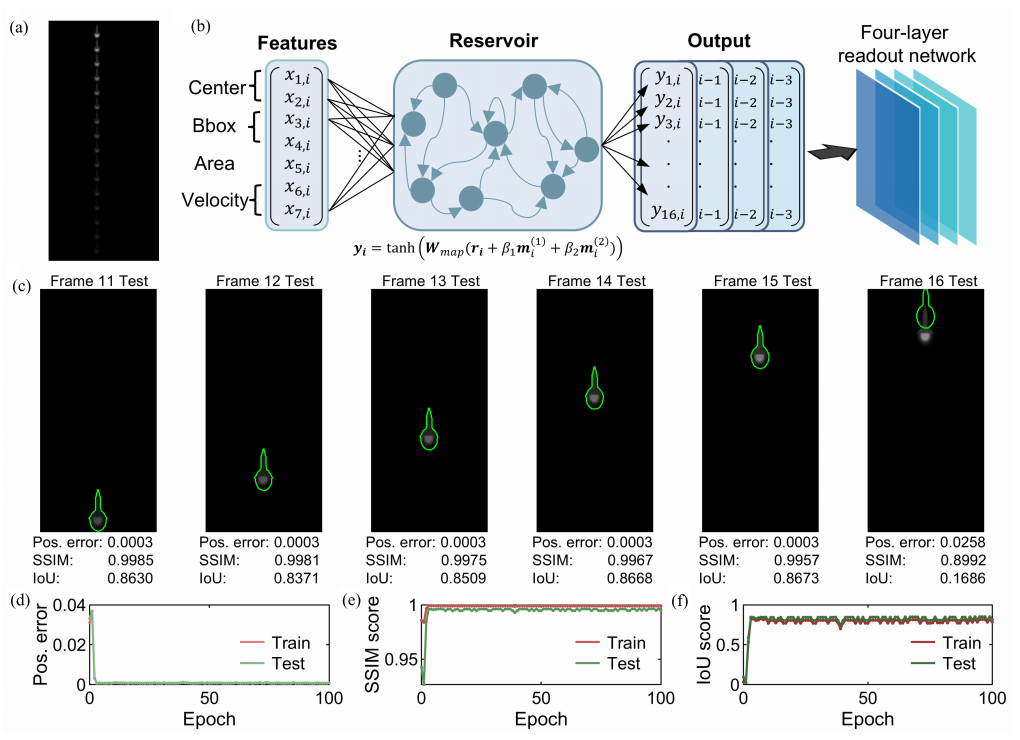
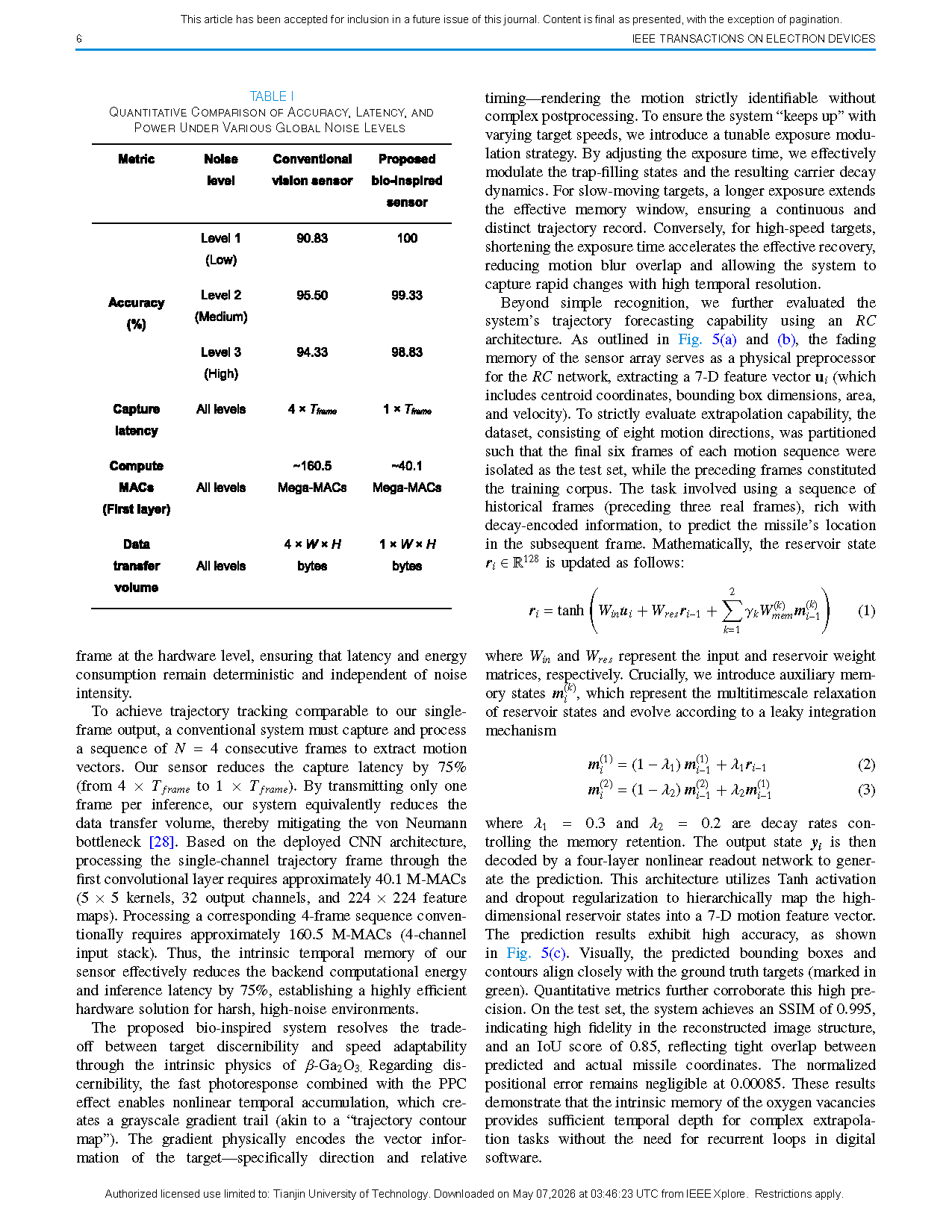
图 5. 基于运动轨迹的下一位置预测。(a) 高速导弹的运动轨迹。(b) 基于储备池计算(RC)的位置预测流程图。(c) 90° 运动的预测输出图像。(d) 训练集与测试集的位置误差、(e) SSIM 与 (f) IoU 随训练轮次的变化。
DOI:
10.1109/TED.2026.3687192